扫一扫,手机浏览
扫一扫,手机浏览- 技术文章
HVL031加热器应用在变桨柜中
2014-02-21 15:12:39 来源:SKSING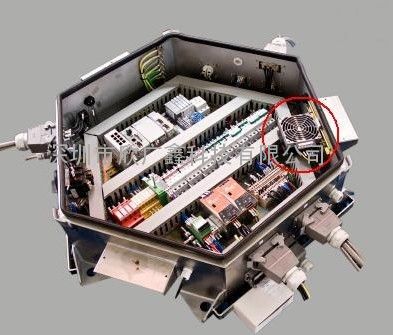
1 综述
变桨系统的所有部件都安装在轮毂上。风机正常运行时所有部件都随轮毂以一定的速度旋转。
变桨系统通过控制叶片的角度来控制风轮的转速,进而控制风机的输出功率,并能够通过空气动力制动的方式使风机安全停机。
风机的叶片(根部)通过变桨轴承与轮毂相连,每个叶片都要有自己的相对独立的电控同步的变桨驱动系统。变桨驱动系统通过一个小齿轮与变桨轴承内齿啮合联动。
风机正常运行期间,当风速超过机组额定风速时(风速在12m/s到25m/s之间时),为了控制功率输出变桨角度限定在0度到30度之间(变桨角度根据风速的变化进行自动调整),通过控制叶片的角度使风轮的转速保持恒定。任何情况引起的停机都会使叶片顺桨到90度位置(执行紧急顺桨命令时叶片会顺桨到91度限位位置)。
变桨系统有时需要由备用电池供电进行变桨操作(比如变桨系统的主电源供电失效后),因此变桨系统必须配备备用电池以确保机组发生严重故障或重大事故的情况下可以安全停机(叶片顺桨到91度限位位置)。此外还需要一个冗余限位开关(用于95度限位),在主限位开关(用于91度限位)失效时确保变桨电机的安全制动。
由于机组故障或其他原因而导致备用电源长期没有使用时,风机主控就需要检查备用电池的状态和备用电池供电变桨操作功能的正常性。
每个变桨驱动系统都配有一个绝对值编码器安装在电机的非驱动端(电机尾部),还配有一个冗余的绝对值编码器安装在叶片根部变桨轴承内齿旁,它通过一个小齿轮与变桨轴承内齿啮合联动记录变桨角度。
风机主控接收所有编码器的信号,而变桨系统只应用电机尾部编码器的信号,只有当电机尾部编码器失效时风机主控才会控制变桨系统应用冗余编码器的信号。2 变浆系统的作用
根据风速的大小自动进行调整叶片与风向之间的夹角实现风轮对风力发电机有一个恒定转速;利用空气动力学原理可以使桨叶顺浆90°与风向平行,使风机停机。3 主要部件组成
4变桨系统各部件的连接框图图 1:各部件间连接框图
变桨中央控制箱执行轮毂内的轴控箱和位于机舱内的机舱控制柜之间的连接工作。
变桨中央控制箱与机舱控制柜的连接通过滑环实现。通过滑环机舱控制柜向变桨中央控制柜提供电能和控制信号。另外风机控制系统和变桨控制器之间用于数据交换的 Profibus-DP 的连接也通过这个滑环实现。
变桨控制器位于变桨中央控制箱内,用于控制叶片的位置。另外,三个电池箱内的电池组的充电过程由安装在变桨中央控制箱内的中央充电单元控制。
4.1 中控箱 内部风扇加热器SHVL031应用在些 如图图 2:中控箱
4.2 轴控箱
在变桨系统内有三个轴控箱,每个叶片分配一个轴控箱。箱内的变流器控制变桨电机速度和方向。
图 3:轴控箱
4.3 电池箱
和轴控箱一样,每个叶片分配一个电池箱。在供电故障或 EFC 信号(紧急顺桨控制信号)复位的情况下,电池供电控制每个叶片转动到顺桨位置。图 4:电池箱
4.4 变桨电机
变桨电机是直流电机,正常情况下电机受轴控箱变流器控制转动,紧急顺桨时电池供电电机动作。图 5:变桨电机
4.5 冗余编码器
图 6:冗余编码器
4.6 限位开关
每个叶片对应两个限位开关:91度限位开关和96度限位开关。96度限位开关作为冗余开关使用。图 7:限位开关
4.7 各部件间连接电缆
变桨中央控制箱、轴控箱、电池箱、变桨电机、冗余编码器和限位开关之间通过电缆进行连接。为了防止连接电缆时产生混乱,电缆有各自的编号。5 变桨系统的保护种类
位置反馈故障保护:为了验证冗余编码器的可利用性及测量精度,将每个叶片配置的两个编码器采集到的桨距角信号进行实时比较,冗余编码器完好的条件是两者之间角度偏差小于2°;所有叶片在91°与95°位置各安装一个限位开关,在0°方向均不安装限位开关,叶片当前桨距角是否小于0°,由两个传感器测量结果经过换算确定。 除系统掉电外,当下列任何一种故障情况发生时,所有轴柜的硬件系统应保证三个叶片以10°/s的速度向90°方向顺桨,与风向平行,风机停止转动: 任意轴柜内的从站与PLC主站之间的通讯总线出现故障, 由轮毂急停、塔基急停、机舱急停、震动检测、主轴超速、偏航限位开关串联组成的风机安全链以及与安全链串联的两个叶轮锁定信号断开(24V DC信号);无论任何一个编码器出现故障,还是同一叶片的两个编码器测量结果偏差超过规定的门限值;任何叶片桨距角在变桨过程中两两偏差超过2°;构成安全链、释放回路中的硬件系统出现故障;任意系统急停指令。变桨调节模式时,预防桨距角超过限位开关的措施: 91°限位开关;到达限位开关时,变桨电机刹车抱闸; 轴柜逆变器的释放信号及变桨速度命令无效,同样会使变桨电机静止。 变桨电机刹车抱闸的条件:轴柜变桨调节方式处于自动模式下,桨距角超过91°限位开关位置;轴柜上控制开关断开;电网掉电且后备电电源输出电压低于其*低允许工作电压;控制电路器件损坏。图8:变浆机构机械连接
电机变桨距控制机构可对每个桨叶采用一个伺服电机进行单独调节,如图8所示。伺服电机通过主动齿轮与桨叶轮毅内齿圈相啮合,直接对桨叶的节距角进行控制。位移传感器采集桨叶节距角的变化与电机形成闭环PID负反馈控制。在系统出现故障,控制电源断电时,桨叶控制电机由蓄电池供电,将桨叶调节为顺桨位置,实现叶轮停转。
6 变桨系统故障分析
6.1变桨控制系统常见故障原因及处理方法
6.1.1变桨角度有差异
叶片1变桨角度有差异
叶片2变桨角度有差异
叶片3变桨角度有差异
原因:变桨电机上的旋转编码器(A编码器)得到的叶片角度将与叶片角度计数器(B编码器)得到的叶片角度作对比,两者不能相差太大,相差太大将报错。
处理方法:1.由于B编码器是机械凸轮结构,与叶片的变桨齿轮啮合,精度不高且会不断磨损,在有大晃动时有可能产生较大偏差,因此先复位,排除故障的偶然因素;2.如果反复报这个故障,进轮毂检查A、B编码器,检查的步骤是先看编码器接线与插头,若插头松动,拧紧后可以手动变桨观察编码器数值的变化是否一致,若有数值不变或无规律变化,检查线是否有断线的情况。编码器接线机械强度相对低,在轮毂旋转时,在离心力的作用下,有可能与插针松脱,或者线芯在半断半合的状态,这时虽然可复位,但转速一高,松动达到一定程度信号就失去了,因此可用手摇动线和插头,若发现在晃动中显示数值在跳变,可拔下插头用万用表测通断,有不通的和时通时断的,要处理,可重做插针或接线,如不好处理直接更换新线。排除这两点说明编码器本体可能损坏,更换即可。由于B编码器的凸轮结构脆弱,多次发生凸轮打碎,因此对凸轮也应做检查。
6.1.2叶片没有到达限位开关动作设定值
原因:叶片设定在91°触发限位开关,若触发时角度与91°有一定偏差会报此故障。
处理方法:检查叶片实际位置。限位开关长时间运行后会松动,导致撞限位时的角度偏大,此时需要一人进入叶片,一人在中控器上微调叶片角度,观察到达限位的角度,然后参考这个角度将限位开关位置重新调整至刚好能触发时,在中控器上将角度清回91°。限位开关是由螺栓拧紧固定在轮毂上,调整时需要2把小活扳手或者8mm叉扳。
6.1.3某个桨叶91°或95°触发
有时候是误触发,复位即可,如果复位不了,进入轮毂检查,有垃圾卡主限位开关,造成限位开关提前触发,或者91度限位开关接线或者本身损坏失效,导致95°限位开关触发。
叶片1限位开关动作
叶片2限位开关动作
叶片3限位开关动作
原因:叶片到达91°触发限位开关,但复位时叶片无法动作或脱离限位开关。
处理方法:首先手动变桨将桨叶脱离后尝试复位,若叶片没有动作,有可能的原因有:①机舱柜的手动变桨信号无法传给中控器;可在机舱柜中将141端子和140端子下方进线短接后手动变桨②检查轴控柜内开关是否有可能因过流跳开,若有合上开关后将桨叶调至90°即可复位③轴控箱内控制桨叶变将的6K1接触器损坏,检查如损坏更换,同时检查其他电器元件是否有损坏。
6.1.4 变桨电机温度高
变桨电机1温度高
变桨电机2温度高
变桨电机3温度高
变桨电机1电流超过*大值
变桨电机2电流超过*大值
变桨电机3电流超过*大值
原因:温度过高多数由于线圈发热引起,有可能是电机内部短路或外载负荷太大所致,而过流也引起温度升高。
处理方法:先检查可能引起故障的外部原因:变桨齿轮箱卡瑟、变桨齿轮夹有异物;再检查因电气回路导致的原因,常见的是变桨电机的电器刹车没有打开,可检查电气刹车回路有无断线、接触器有无卡瑟等。排除了外部故障再检查电机内部是否绝缘老化或被破坏导致短路。
6.1.5变浆控制通讯故障
原因:轮毂控制器与主控器之间的通讯中断,在轮毂中控柜中控器无故障的前提下,主要故障范围是信号线,从机舱柜到滑环,由滑环进入轮毂这一回路出现干扰、断线、航空插头损坏、滑环接触不良、通讯模块损坏等。
处理方法:用万用表测量中控器进线端电压为230v左右,出线端电压为24v左右,说明中控器无故障,继续检查,将机舱柜侧轮毂通讯线拔出,红白线、绿白线,将红白线接地,轮毂侧万用表一支表笔接地,如有电阻说明导通,无断路,有断路启用备用线,若故障依然存在,继续检查滑环,我场风机绝大多数变桨通讯故障都由滑环引起。齿轮箱漏油严重时造成滑环内进油,油附着在滑环与插针之间形成油膜,起绝缘作用,导致变桨通讯信号时断时续,冬季油变粘着,变桨通讯故障更为常见。一般清洗滑环后故障可消除,但此方法治标不治本,从根源上解决的方法是解决齿轮箱漏油问题。滑环造成的变桨通讯还有可能有插针损坏、固定不稳等原因引起,若滑环没有问题,得将轮毂端接线脱开与滑环端进线进行校线,校线的目的是检查线路有无接错、短接、破皮、接地等现象。滑环座要随主轴一起旋转,里面的线容易与滑环座摩擦导致破皮接地,也能引起变桨故障。
6.1.6变桨错误
原因:变桨控制器内部发出的故障,变桨控制器OK信号中断,可能是变桨控制器故障,或者信号输出有问题。
处理方法:此故障一般与其他变桨故障一起发生,当中控器故障无法控制变桨时,PITCH CONTROLLER OK信号为0,可进入轮毂检查中控器是否损坏,一般中控器故障,会导致无法手动变桨,若可以手动变桨,则检查信号输出的线路是否有虚接、断线等,前面提到的滑环问题也能引起此故障。
6.1.7变桨失效
原因:当风轮转动时,机舱柜控制器要根据转速调整变桨位置使风轮按定值转动,若此传输错误或延迟300ms内不能给变桨控制器传达动作指令,则为了避免超速会报错停机。
处理方法:机舱柜控制器的信号无法传给变桨控制器主要由信号故障引起,影响这个信号的主要是信号线和滑环,检查信号端子有无电压,有电压则控制器将变桨信号发出,继续查机舱柜到滑环部分,若无故障继续检查滑环,再检查滑环到轮毂,分段检查逐步排查故障。
变浆电机1转速高
变浆电机2转速高
变浆电机3转速高
原因:检测到的变桨转速超过31°每秒,这样的转速一般不会出现,大多数由于旋转编码器故障引起。或者由轮毂传出的RPM OK信号线问题引起。
处理方法:可参照检查变桨编码器不同步的故障处理方法编码器问题,编码器无故障则转向检查信号传输问题。
6.2变桨机械部分常见故障原因及处理方法
变桨机械部分的故障主要集中在减速齿轮箱上,保养不到位加之质量问题,使减速齿轮箱有可能损坏,在有卡瑟转动不畅的情况下会导致变桨电机过流并且温度升高,因此有电机过流和温度高的情况频发时,要检查减速齿轮箱。
轮毂内有给叶片轴承和变桨齿轮面润滑的自动润滑站,当缺少润滑油脂或油管堵塞时,叶片轴承和齿面得不到润滑,长时间运行必然造成永久地损伤,变桨齿轮与B编码器的铝制凸轮没有润滑,长时间摩擦,铝制凸轮容易磨损,重则将凸轮打坏,造成编码器不同步致使风机故障停机,因此需要重视润滑这个环节,长时间的小毛病的积累,必然导致机械部件不可挽回的损坏。
6.3蓄电池部分常见故障及处理方法
变浆电池充电器故障
原因:轮毂充电器3A1不充电,有可能3A1已经损坏,有可能由于电网电压高导致无法充电。
处理方法:观察停机代码,一般轮毂充电器不工作引起3面蓄电池电压降低,将会一起报
叶片1蓄电池电压故障
叶片2蓄电池电压故障
叶片3蓄电池电压故障
检查3A1,测量有无230V交流输入,有230交流电压说明输入电源没问题,再测量有无230V左右直流输出和24V直流输出,有输入无输出则可更换3A1,若由于电网电压短时间过高引起,则电压恢复后即可复位。
叶片1蓄电池电压故障(单独报错)
叶片2蓄电池电压故障(单独报错)
叶片3蓄电池电压故障(单独报错)
原因:若只是单面蓄电池电压故障,则不是由轮毂充电器不充电导致,可能由于蓄电池损坏、充电回路故障等引起。
处理方法:按下轮毂主控柜的充电实验按钮,3面轮流试充电,此时测量吸合的电流接触器的出线端有无230V直流电源,再顺着充电回路依次检查各电气元件的好坏,检查时留意有无接触不良等情况,确定充电回路无异常,则检查是否由于蓄电池故障导致不能充电。打开蓄电池柜,蓄电池由3组,每组6个蓄电池串联组成,单个蓄电池额定电压12V,先分别测量每组两端的电压,若有不正常的电压,则挨个测量每个蓄电池,直到确定故障的蓄电池位置,将损坏蓄电池更换,再充电数个小时(具体充电时间根据更换的数量和温度等外部因素决定),一般充电12小时即可。若不连续充电直接运行,则新蓄电池没有彻底激活,寿命大打折扣,很快也会再次损坏,还有可能导致其他蓄电池损坏。
7、变桨系统飞车的原因分析及预防
介于风力机的变桨系统的构成及工作原理,能导致叶片飞车的原因有以下3种:
1) 蓄电池的原因:由变桨系统构成可以得出,在风机因突发故障停机时,是完全依靠轮毂中的蓄电池来进行收桨的。因此轮毂中的蓄电池储能不足或电池失电,导致出故障时,不能及时回桨,而会引发飞车。蓄电池故障主要有2个方面的影响:由于蓄电池前端的轮毂充电器损坏,导致蓄电池无法充电,直至亏损;由于蓄电自身的质量问题,如果1组中有1-2块蓄电池放亏,电池整体电压测量时属于正常范围中,但是电池单体电压测量后已非正常区间,这种蓄电池在出现故障后已不能提供正常电拖动力,来有效的促使桨叶回收,而*终引发飞车事故。
2) 信号滑环的原因:该种风机绝大多数变桨通讯故障都由滑环接触不良引起。齿轮箱漏油严重时造成滑环内进油,油附着在滑环与插针之间形成油膜,起绝缘作用,导致变桨通讯信号时断时续,致使主控柜控制单元无法接受和反馈处理超速信号,导致变桨系统无法停止,直至飞车;由于滑环的内部构造的原因,会出现滑环磁道与探针接触不良等现象,也会引发信号的中断和延时,其中不排除探针会受力变形。
3) 超速模块的原因:超速模块主要作用就是监控主轴及齿轮箱低速轴和叶片的超速。该模块为同时监测轴系的三个转速测点,以三取二逻辑方式,对轴系超速状态进行判断。三取二超速保护动作有独立的信号输出,可直接驱动设备动作。具有两通道配合可完成轴旋转方向和旋转速度的测量。使用有一定齿距要求的齿盘产生两个有相位偏移的信号,A通道监测信号间的相位偏移得到旋转方向,B通道监测信号周期时间得到旋转速度。当该模块软件失效后或信号感知出现问题,会导致在超速时,风机主控不能判断故障及时停机,而引发导致飞车。
为了预防变桨系统飞车事故的发生,我们应该以预防为主,其预防方法如下:定期的检查蓄电池单体电池电压,定期的做蓄电池充放电实验,并将蓄电池检测时间控制在合理区间,运行过程中密切注意电网供电质量,尽量减少大电压对轮毂充电器及UPS的冲击,尽可能的避免不必要的元器件的损坏;彻底根除齿轮箱漏油的弊病,定期开展滑环的清洗工作,保证滑环的正常工作;有针对性的测试超速模块KL1904的功能,避免该模块软故障的形成。
上一篇:PTC加热器RC016应用大MOOG滑环中下一篇:变频电源升温除湿方案新发布 -
-

深圳市欣广鑫科技有限公司
自主品牌产品:机柜温控器、机柜湿控器、机柜加热器、风扇加热器、PTC加热器、机柜照明灯 代理品牌产品:良信、艾默生、禾望备件、百能堡、DBK等风电备件
内容声明:谷瀑为第三方平台及互联网信息服务提供者,谷瀑(含网站、客户端等)所展示的商品/服务的标题、价格、详情等信息内容系由店铺经营者发布,其真实性、准确性和合法性均由店铺经营者负责。谷瀑提醒您购买商品/服务前注意谨慎核实,如您对商品/服务的标题、价格、详情等任何信息有任何疑问的,请在购买前通过谷瀑与店铺经营者沟通确认;谷瀑上存在海量店铺,如您发现店铺内有任何违法/侵权信息,请在谷瀑首页底栏投诉通道进行投诉。深圳市欣广鑫科技有限公司 电话:0755-27198090 手机:18028716683 地址: 广东省深圳市龙岗区南联向银路安旭工业园5楼